摘 要:激光回馈是一种新型的波片位相延迟测量的方法。将波片放置在激光器与回馈镜之间,可使激光回馈波形产生偏振 90 度旋转(即跳变)现象,而两偏振态所占的周期比(占空比)与波片的位相延迟相关。先测得占空比即可由计算机自动给出波片位相延迟。采用正 反向两次扫描回馈镜,两次获得并测出占空比,可以很好地消除由于两偏振态损耗的波动造 成的测量误差,提高了该方法长期测量的稳定性。测量的重复性达到 0.5 度。该方法结构简 单,在线测量精度高,满足工业化生产的需要。
关键词:激光回馈;波片位相差;偏振跳变
1. 引言
波片作为位相延迟器,在与偏振光有关的光学系统中有着广泛的应用,如外差激光干涉 仪,偏振光干涉系统,偏光显微镜、椭偏仪、光隔离器、窄带光滤波器、可调光衰减器、光 盘驱动器光拾取头等等,其中波片的位相延迟误差会对系统产生影响[1]。正是由于波片在实 际光学系统中的广泛应用,波片的测量技术显得尤为重要。传统的测量方法有旋转消光法、电光调制法、磁光调制法等,这些方法本质上都属于消光法,需要测角机构,使得整个系统结构庞大,并且测角的精度会对测量结果产生很大的影响[2-6]。新型的测量方法包括激光频率分裂法、激光回馈法等,激光频率分裂法精度很高,结构也很简单,但是需要对波片镀增透膜,不适合实际生产的测量要求[7]。而激光回馈法中,待测波片在激光腔外,不需要进行镀膜处理,而且整个系统中不需要测角机构以及高精度的检偏器,结构十分简单,因而大大 简化了测量的过程,很适合在线测量的需要。
激光回馈法是利用激光回馈中的偏振跳变现象,通过测量一个扫描周期中两个偏振态的占空比来实现对波片的测量。由于在长期的测量过程中,很难保证激光器对于两个偏振态的损耗完全相同,同时,波片的倾斜会造成两个偏振态的透过率不同,当两个偏振态的光强比值发生变化时,会造成上述占空比的变化,最终导致测量结果产生误差。本文提出了一种双 向扫描测量的方法,可以从理论上完全消除这种误差源,有效地提高了该方法长期测量的准 确性。
测量装置: 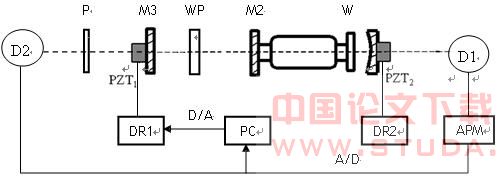
图 1 激光回馈波片测量仪装置图
激光回馈波片位相延迟法的测量装置如图 1 所示,反射镜 M1、M2 及增透窗片 W 构成
半外腔单纵模 He-Ne 激光器,通过控制压电陶瓷 PZT2 可以使激光器始终在中心频率附近工 作;M3 为回馈镜,反射率为 10%,由压电陶瓷 PZT1 驱动,在计算器输出的三角波信号的 驱动下做往复运动;WP 为待测波片,其快轴方向与激光器的本征偏振方向一致;D1 为光电探测器,探测激光器的光强信号,经放大器 APM 及 A/D 转换后送入计算机处理;P 为检 偏器,与光电探测器 D2 一起探测回馈信号的偏振信息。
在测量过程中,激光器保证始终工作在中心频率处,出射的线偏振光的偏振方向与波片 的快轴方向重合,PZT1 推动回馈镜 M3 来改变外腔腔长,则我们通过探测器 D2 可以探测到偏振跳变的波形,根据激光回馈偏振跳变的理论,当回馈腔中存在双折射元件的时候,回 馈波形会产生偏振跳变现象,如图 2 所示。
2. 偏振跳变原理及误差源分析
2.1 o, e 光等效反射率及跳变原理
关于激光回馈偏振跳变理论已有文章做过详细的论述[8]。这里对该理论进行简化性的论 述。
我们把 M2 及回馈镜 M3 等效为 F-P 腔,由于回馈镜的反射率很低,所以我们只考虑
M3 的一次反射。记 M2 的反射系数为 r2 ,透射系数为 t2 ,回馈镜 M3 的反射系数为 r3 ,由 多光束干涉理论我们可以得到此 F-P 腔的等效反射系数为 ![]()
其等效反射率为:![]()
由于 r3 很小,可以忽略二阶项,于是等效反射率可简化为
R R 2 r r t 2
而等效腔镜反射率的变化,将直接影响光强信号。所以当外腔没有双折射元件的时候,随着回馈镜的移动,光强呈现为随 L 变化的余弦波形。
当外腔存在双折射元件时,设 o 光方向为 x 方向,e 光方向为 y 方向。双折射元件产生 的位相差为 ,则此时 x、y 两个方向上的等效反射率不一样,分别为 ![]()
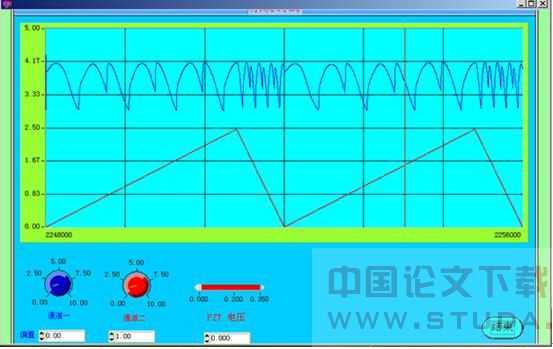
图 2 激光回馈偏振跳变波形![]()
当激光的偏振方向为 x 方向时,x 偏振态的等效反射率 R( x x ) R( x ) 23 ,此时由于 y 偏振光 没有出射,并未进入到外腔,所以其等效反射率 R R2 ;当激光的偏振方向为 y 方向 时,由于 x 偏振光没有出射,并未进入到外腔,因此 x 偏振态的等效反射率 R R2 ,y 偏振光的等效反射率 R ( y y ) R( y ) 23 。对于激光器而言,出射激光的偏振方向取决于两个偏振态各自的损耗。而激光器的损耗与腔镜的反射率密切相关,反射率越大,其损耗越小。假设初始激光器的偏振态为 x,L 的初始
位置位于 A 点,因此,从图 3 中我们可以看出,在 AB 段,R ( x- x ) > R( x-
,出射光保持为x 偏振态;在 B 点以后,
R ( x- x )
(略,想看可以看pdf原文)
2.2 迟滞效应的影响
当 L 向相反方向运动时,按照前边的分析方法,可以得到光强信号及对应的偏振态。 我们可以得到:L 正向运动和反向运动时,等效反射率所走过的路线不一样,偏振态跳变的 方向也不一样,如图 4 所示:当 L 正向运动时,由 x 偏振态跳变到 y 偏振态,x 偏振态所占 周期比大;而当 L 反向运动时,则是由 y 偏振态跳变到 x 偏振态,y 偏振态所占周期比大。 这就是激光回馈偏振跳变现象中的迟滞效应。
我们利用这种偏振跳变的现象,可以实现对波片位相延迟的测量。根据实验的结果,我
3
4. 实验结果
图 6 为实际测量过程中的波形图。我们可以看到,x 偏振态和 y 偏振态的最大光强明显不同,这也就说明,在整个回馈系统中,两偏振态的损耗是不同的。在长时间的测量过程中,这种差异也会随之变化,这就对系统长期测量的一致性产生影响。通过同时测量上升沿和下降沿的周期比,并对两个比值进行平均,可以有效的提高长期测量的稳定性。
图 7 为波片测量仪对一波片连续 8 小时测量的结果。我们可以看到,上升沿的测量结果 整体上是上升的,同时,对应的下降沿的测量结果整体趋势是下降的,因此,通过对二者进 行一个平均处理,补偿后的测量值没有明显的倾斜方向,这也就保证了该系统长期测量结
果的一致性。 由于在实际测量中,我们使用的是压电陶瓷作为驱动装置,来推动回馈镜正向移动和反
向移动,而压电陶瓷存在着迟滞效应,缩短时的曲线线性度不是很好,会对测量结果造成影 响。我们可以通过以后的工作改进系统,改变驱动的形式来消除这部分造成的误差。
5. 结论
本文通过对偏振跳变原理的分析、以及对基于该原理的波片测量方法的理解,提出了一种对该测量方法的改进措施。这种改进措施利用了偏振跳变原理中的迟滞效应和偏振态的改变,对上升沿测量值和下降沿测量值进行了平均化的处理,从而大大降低了两偏振态损耗的不同对测量结果造成的影响。从实验结果我们也可以看到,激光器确实存在着两偏振态损耗随时间变化的现象,从而使得长期测量的稳定性受到影响。而通过该改进方法,有效地提高了长期测量结果的稳定性,从而大大增强了该波片测量方法的实用性。